#include <RobotComponent.h>
Public Member Functions | |
| RobotComponent () | |
| virtual | ~RobotComponent () |
| virtual void | ComponentInit () |
| virtual void | Sense () |
| virtual void | DoWork () |
Detailed Description
Standard interface for Robot Components supporting iterative operation.
Example
Here we have a robot component, "SmelloVision", which is a subclass of RobotComponent. The SmelloVision class implements just two of the parent class members, ComponentInit() and Sense(). Because the (fictional) Olfactory sensor is input-only, the DoWork() member is not implemented in this subclass.
To facilitate reporting of the sensed value, the class has a private data member scentIndex, which stores the reading from the sensor, and a public member function reportScent(), which can be called to retrieve the most recent sensor value.
The Robot class utilizes the component via the standard interface provided through class RobotComponent, and does not need to be concerned with any of the details of the component itself.
In SmelloVision.h:
#include <RobotComponent.h>
class SmelloVision : public RobotComponent
{
public:
void ComponentInit() // This subclass has specific initialization
void Sense(); // ...and it has specific sensor input
uint32_t reportScent(); // ...and extends its own reporting method
// BUT does not DoWork!
private:
Olfactory m_nose;
static const uint32_t
SmellChannel; ///< Channel number for nose
uint32_t scentIndex; // 0-255, identifying dominant smell,
// shared amongst member functions
};
In SmelloVision.cpp:
#include <SmelloVision.h>
const uint32_t SmelloVision::SmellChannel = 5;
SmelloVision::SmelloVision()
{
scentIndex = 0; // Initialize private member value
// Remember: use ComponentInit to set up devices.
}
void SmelloVision::Sense() {
scentIndex = m_nose.Get(); // Set private member value
}
void SmelloVision::ComponentInit() {
m_nose = new Olfactory(SmellChannel); // Initialize Olfactory sensor
}
uint32_t SmelloVision::reportScent() {
return scentIndex;
}
In myRobot.cpp:
#include <RobotComponent.h>
#include <SmelloVision.h>
class myRobot : public IterativeRobot
{
public:
myRobot() {};
void RobotInit();
void TeleopPeriodic();
private:
SmelloVision sniffer; ///< Instance of RobotComponent
};
void myRobot::RobotInit()
{
sniffer.ComponentInit();
}
void myRobot::TeleopPeriodic()
{
// Start iteration by having each component sense
sniffer.Sense();
// Complete iteration by having each component DoWork
sniffer.DoWork(); // Remember - SmelloVision doesn't DoWork,
// But the common interface from RobotComponent
// provides default behavior. (do nothing)
}
Definition at line 111 of file RobotComponent.h.
Constructor & Destructor Documentation
| RobotComponent::RobotComponent | ( | ) |
Constructor
Definition at line 12 of file RobotComponent.cpp.
|
virtual |
Destructor
Definition at line 17 of file RobotComponent.cpp.
Member Function Documentation
|
virtual |
Called once, to perform initialization that isn't appropriate for constructor.
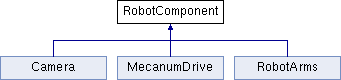
Reimplemented in Camera, MecanumDrive, and RobotArms.
Definition at line 21 of file RobotComponent.cpp.
|
virtual |
Component-specific worker function.
Reimplemented in MecanumDrive, Camera, and RobotArms.
Definition at line 29 of file RobotComponent.cpp.
|
virtual |
Component-specific sensory input collector
Reimplemented in Camera, MecanumDrive, and RobotArms.
Definition at line 25 of file RobotComponent.cpp.
The documentation for this class was generated from the following files:
- src/RobotComponent.h
- src/RobotComponent.cpp