|
libpropeller
Making PropellerGCC Easier
|
|
libpropeller
Making PropellerGCC Easier
|
Summary of supported sentences (note: order changed): GLL - Lat, long, time, status RMC - Lat, long, time, status, speed, true heading, date, magnetic variation GGA - Lat, long, time, status (enhanced), #sats, horizontal precision, altitude, geoidal seperation, differentialGPS age, differentialGPS referenceID VTG - true heading, magnetic heading, speed knots, speed km/hr GSA - Satelite IDs GSV - Satelite SNR in dB data. More...
#include <mtk3339.h>

Public Member Functions | |
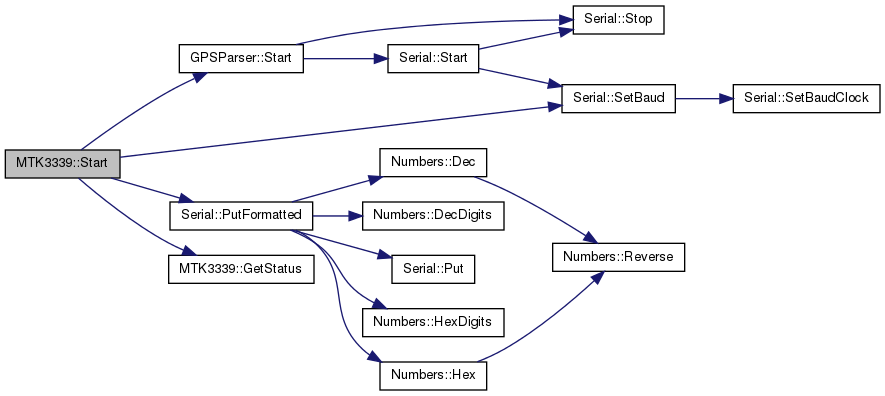
| bool | Start (int rxPin, int txPin, int ppsPin=-1) |
| Send configuration packets: More... | |
| bool | GetStatus (void) |
 Public Member Functions inherited from GPSParser Public Member Functions inherited from GPSParser | |
| bool | Start (const int rx_pin, const int tx_pin, const int baud) |
| Create the parser and launch a new cog. More... | |
| ~GPSParser () | |
| Stop the GPS parsing, and the cog that was started. More... | |
| char * | Get () |
| Gets a NMEA string. More... | |
| char * | Get (char string[], const int maxBytes=kNmeaMaxLength) |
| Same as Get(), but with the option of specifying a buffer to use instead of the internal buffer. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from GPSParser | |
| Serial | gps_serial_ |
Summary of supported sentences (note: order changed): GLL - Lat, long, time, status RMC - Lat, long, time, status, speed, true heading, date, magnetic variation GGA - Lat, long, time, status (enhanced), #sats, horizontal precision, altitude, geoidal seperation, differentialGPS age, differentialGPS referenceID VTG - true heading, magnetic heading, speed knots, speed km/hr GSA - Satelite IDs GSV - Satelite SNR in dB data.
|
inline |
|
inline |
Send configuration packets:
220 PMTK_SET_NMEA_UPDATERATE 100 (milliseconds, 10Hz) 251 PMTK_SET_NMEA_BAUDRATE 115200 (baud) 341 PMTK_API_SET_NMEA_OUTPUT GLL 0 (disabled) RMC 1 (10 Hz) VTG 0 (disabled) GGA 1 (10 Hz) GSA 5 (2 Hz) GSV 5 (2 Hz)
Requires that the previous baud be either 9600 (factory default) or 115200. Other baud rates are not supported, and will result in GetStatus() == false.
 1.8.4
1.8.4

