|
libpropeller
Making PropellerGCC Easier
|
|
libpropeller
Making PropellerGCC Easier
|
MS5611 Barometer interface. More...
#include <ms5611.h>
Public Types | |
| enum | AddressLSB { LSB_0, LSB_1 } |
| Specify the least significant address bit. More... | |
Public Member Functions | |
| MS5611 () | |
| Initialize a new MS5611 instance. More... | |
| bool | Init (I2C *newbus, const AddressLSB address=LSB_0) |
| Initialize MS5611 Barometer instance. More... | |
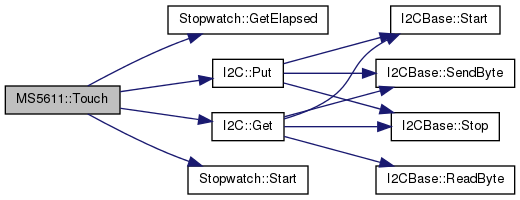
| bool | Touch (void) |
| Keep the MS5611 running. More... | |
| void | Get (int &tPressure, int &tTemperature, const bool calibrationCalculation=true) |
| Get the most current readings from the MS5611 sensor. More... | |
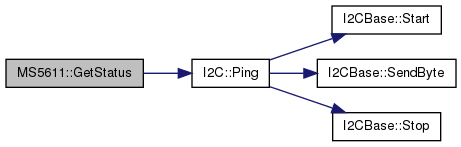
| bool | GetStatus (void) |
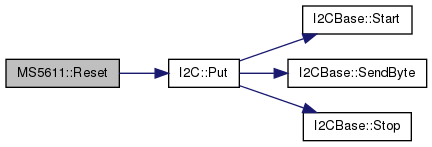
| bool | Reset (void) |
| Reset the pressure sensor. More... | |
MS5611 Barometer interface.
Provides a simple interface to the MS5611 barometer and temperature sensor. Uses the I2C interface to the sensor.
| enum MS5611::AddressLSB |
|
inline |
Initialize a new MS5611 instance.
|
inline |
Get the most current readings from the MS5611 sensor.
Test results indicate that the Get function takes the following amounts of time, at 80MHz in when calibrationCalculation == true:
| tPressure | The pressure, either raw or in units of 0.01 mBar |
| tTemperature | The temperature, either raw or in units of 0.01C |
| calibrationCalculation | Perform calculations to calibrate (they involve 64 bit integers, so they take a while). |
|
inline |
|
inline |
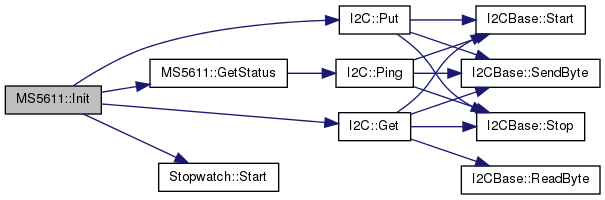
Initialize MS5611 Barometer instance.
This resets and initializes the sensor, reads the PROM, and begins a conversion.
Touch() should be called no sooner than 8.5ms after MS5611 initialization.
| newbus | The I2C bus to use. |
| address | The least significant byte of the I2C address. Use the enum constants. |
|
inline |
Reset the pressure sensor.
|
inline |
Keep the MS5611 running.
In general, must be called twice for every associated Get().
"Touches" the sensor to make sure that it keeps converting at the maximum pace.
Test results indicate that the Touch function takes the following amount of time, at 80MHz in:
 1.8.4
1.8.4

