interface version 1
Builds a 3D point cloud for an UV-mapped geometry, where each point represents a texture pixel.
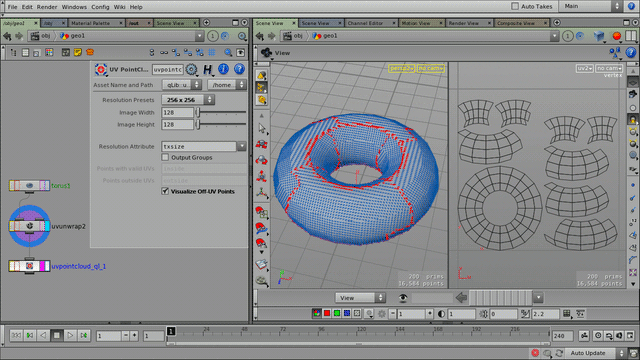
The UV pointcloud built for a torus. Each point corresponds to a pixel in the UV map. (UV border points are displayed in red. Points beyond UV borders get extrapolated UVs.)
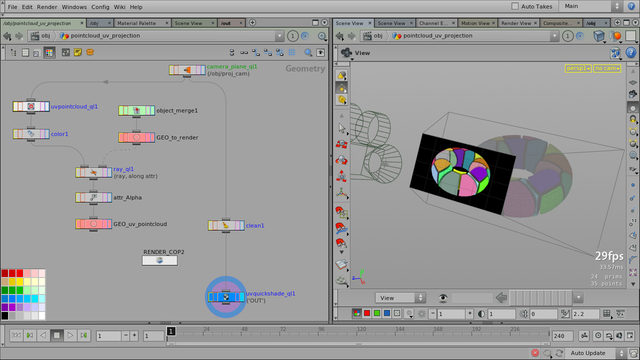
Camera-view rendering of a colored object. The point cloud is projected onto the object from the camera plane, inheriting its colors (see example file workflow/uv_pointcloud_ql_renderproj.hip)
Point Cloud Notes
Each point in the generated point cloud corresponds to a single pixel in an UV texture (of the given resolution). Do not delete any points from the point cloud. (The exception is if the corresponding COP2 node is in “point cloud” mode.)
Points outside valid UV areas are generated extrapolated UVs, so there won’t be any UV border edge artifacts. (A sufficiently large cloud resolution is also required.)
Once the point cloud is built, color can be transferred to it, then it can be converted back to a texture map. See the UV PointCloud qL compositing node for details.
This operator stores the set resolution as a detail attribute, so the COP2 texture builder can automatically detect and use it.
Point Cloud Workflow
There are two operators, a SOP (this one) and a COP2.
The SOP builds a point cloud from UVs; the COP2 builds texture image from the point cloud.
The UV PointCloud qL SOP (this operator) creates a point cloud from a geometry, where
the points are placed on the geometry surface, and each point will roughly represent
one UV sample (“pixel”). The geometry should have uv attributes (which the points
inherit).
After the point cloud is built, any Houdini tool can be used to generate color and
alpha (Cd and Alpha) attributes on the points.
Then, an UV PointCloud qL COP compositing node can be used to render a texture from the colored “UV” points.
Tip
This workflow can be used to generate “dynamic UV texture paint” effects, such as wet maps, etc.
Parameters
| Image Width, Height | The desired output image width and height. By default these will be the dimensions of the image created by the COP2 node. The operator creates one point for each pixel of this image size. |
| Inherit Attribs | A list of input geometry attributes to be inherited by the point cloud. The |
| Resolution Attribute | Name of the detail attribute, containing the image size. (The COP2 node uses this attribute to determine its output resolution.) |
| Output Groups | Creates point groups both for points with valid UVs and points that fell outside of any valid UV areas (i.e. not used by any geometry). |
| Visualize Off-UV Points | Uses a simple color-coding to indicate points outside of valid UV areas. |
Release Notes
interface version 1 —
| 2014-11-29 | Added Inherit Attribs parameter. |
| 2014-03-23 | First version. |